Cogging torque in permanent magnet motors
Introduction
Cogging is an undesirable characteristic of some permanent magnet motor designs. It’s also known in stepper motors as ‘detent’ or ‘no current’ torque.
Cogging torque is generated when the sides of the rotor teeth line up with the sides of the stator teeth within the motor. We can think of permanent motors as having a magnetic circuit as well as an electrical circuit, and when the rotor and stator teeth are aligned the ‘resistance’ in the magnetic circuit is at its lowest.
Cogging Effects
Therefore when you rotate an unpowered motor shaft (e.g. with your fingers) you can feel it ‘jumps’ from the current point and ‘settles’ in another. The torque experienced in these jumps is the torque required to break away from the current rotor/stator alignment and move into the next rotor/stator alignment.
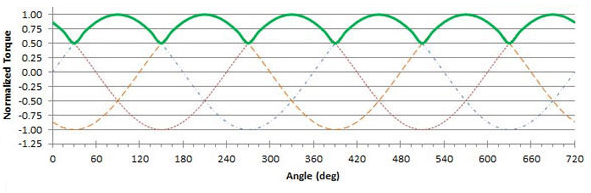
When driven, the cogging torque in motors is undesirable especially at low speed as it causes the output torque of the motor to ripple. At higher speeds, the inertia of the rotor will smooth the rippling making it less obvious. You can see a visualisation of the cogging torque ripple in the diagram in the figure below.
Cogging also presents a varying torque loading when the motor is driven in reverse, and in a (non-geared) positioning system it can also affect the positional accuracy because the rotor tends to lock onto a position where the motor rotor and stators are aligned.
Cogging Solutions
There are several ways to reduce cogging, but nearly all of them involve changes to the motor design.
Coreless motors don’t suffer from cogging at all, due to them having a uniform 360-degree magnetic stator field and no permanent magnetic circuit elements in the rotor. This means that there is no case where the rotor and stator magnetic circuits are falling in/out of alignment.
Another method is to increase the number of poles that a motor uses. A 7-pole motor will experience a lower cogging torque than a 3-pole, and the angle between the cogging positions will be less.
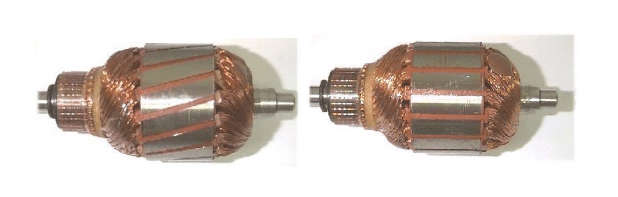
An interesting method for higher torque multi-pole motors is to ‘skew the slot’ as illustrated below in figure 2. These motors are also known as ‘twisted-slot’ motors, but this reduction in cogging comes at a cost. Twisted slot motors have lower efficiencies because the ends of each rotor slot overlap the stators slots, meaning there is less area for the magnetic fields to interact when driven (which is also what reduces the cogging).
One final method which is more advanced is for the motors to have an encoder. Knowing the position of the motor, from the encoder it is possible to modulate the current drive to the motor to compensate for some of the cogging torque ripples and smooth it with electronic drive techniques.
Summary
Cogging is a necessary evil, but in many applications, it doesn’t present any significant problems. If cogging is an issue for your application, the quickest way is to move to a coreless design (either brushed or brushless). However, there are some more advanced techniques that we can employ if a coreless design can’t work (e.g. the torque density of the motor is too low).

Get in touch
Speak to a member of our team.
Motor catalogue
Looking for our products?
Reliable, cost-effective miniature mechanisms and motors that meet your application demands.
Newsletter
Sign up to receive new blogs, case studies and resources – directly to your inbox.

Sign up
Discover more
Resources and guides
Discover our product application notes, design guides, news and case studies.
Case studies
Explore our collection of case studies, examples of our products in a range of applications.
Precision Microdrives
Whether you need a motor component, or a fully validated and tested complex mechanism – we’re here to help. Find out more about our company.