Brushless BLDC Vibration Motors
Some applications call for vibration sources with a very long mean time before failure (MTBF). Another requirement for brushless BLDC motors is negligible noise or sparking, which is of particular interest to those designing ATEX compliant equipment.
Precision Microdrives is leading the market for vibration motors in the area for long life applications. One technology solution is to use long-life linear vibration motors. The other is to use a brushless BLDC vibration motor with eccentric rotating masses (ERM).
For the ERM motors, development is currently based on two form factors; brushless coin motors and larger brushless cylinder motors.
Long Life Brushless Coin Vibration Motor
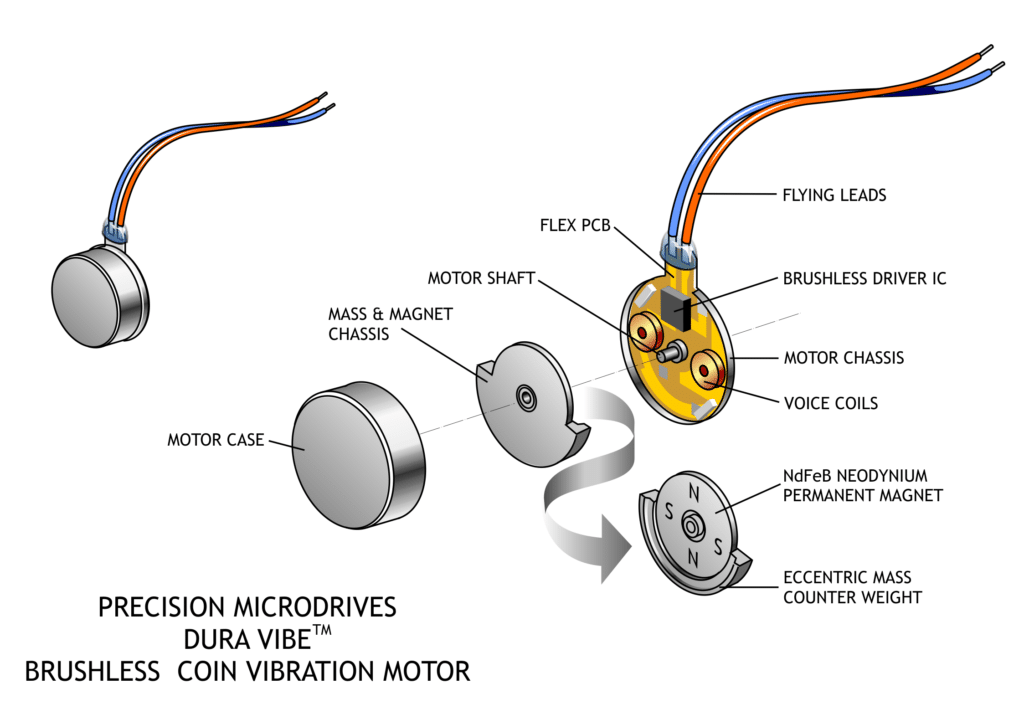
The brushless coin motor design is based on a voice coil principal that’s used a lot in linear vibration motors. Drive power is supplied to a driver IC. In the case of our 910-101 brushless BLDC vibration motor, an Allegro brushless driver IC is used, which generates drive signals in two voice coils that sit on the base PCB.
These alternating drive signals interact with north and south pole pairs built into a circular disc neodymium magnet. The disc magnet is built into a larger disc with an eccentric mass.
The magnetic fields induced in the coils by the drive signals cause the disc containing the magnet to rotate. As the disc rotates, the offset weight in it generates vibration.
Since there is no mechanical commutation, there is far less mechanical wear in the motor than one might find with a regular pancake motor.
Due to the electrical commutation, the brushless coin motor is not practical to use in haptic feedback applications where voltage over-drive and reverse-drive signals are used to create crisp haptic events. However, this brushless BLDC motor is excellent for long life or industrial handheld vibration alerting functions, where the power to the motor is simply switched on / off.
Long Life Cylinder Vibrator Motor
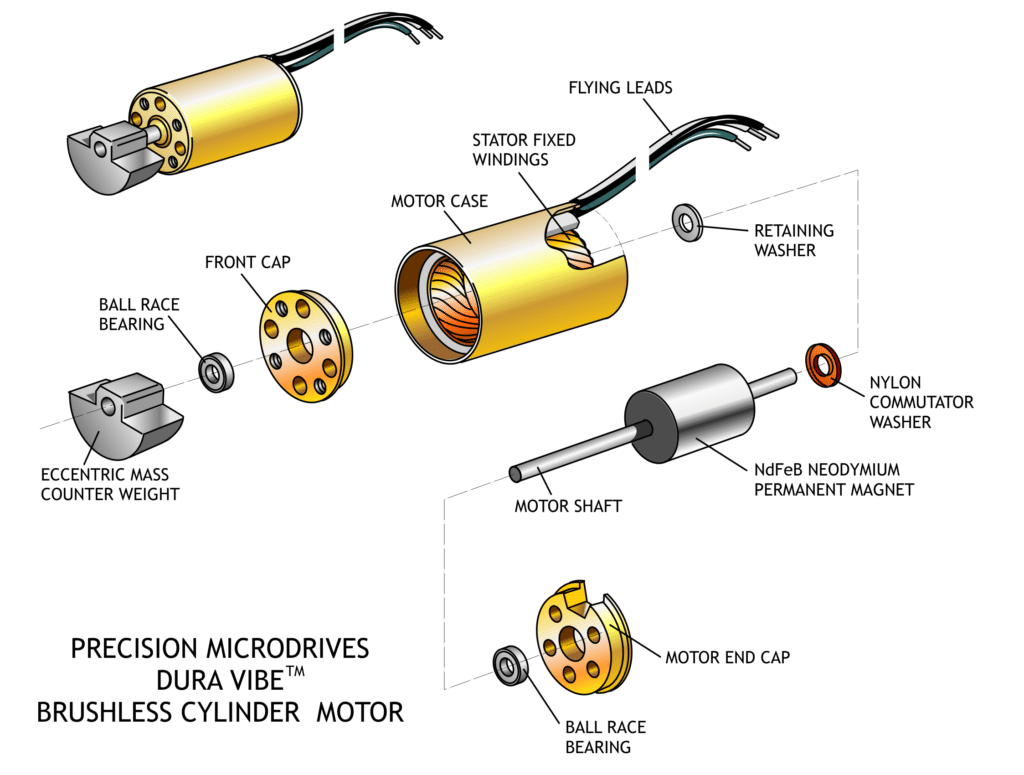
The 12mm brushless BLDC cylinder motor shown in the illustration above is available and intended for long-life massaging equipment and larger instruments that require reliable and long-life vibration alert functionality.
You can find a reference driver circuit here in Application Bulletin 018: Driving Brushless Vibration Motors.
Once completed, we intend to expand the range into larger brushless vibration motors, which would be ideal for liquid and chemical agitation and mixing.

Get in touch
Speak to a member of our team.
Motor catalogue
Looking for our products?
Reliable, cost-effective miniature mechanisms and motors that meet your application demands.
Discover More
Resources & Guides
Discover our product application notes, design guides, news and case studies.
Case Studies
Explore our collection of case studies, examples of our products in a range of applications.
Precision Microdrives
Whether you need a motor component, or a fully validated and tested complex mechanism – we’re here to help. Find out more about our company.