AB-028
Vibration Motor Comparison Guide
One of our most common enquiries is from people all over the world who want to implement vibrations in their application but have never done so before.
The following guide will outline the main types of vibration motor, the various options available for each, and highlight the differences in a comparison table.
Important Vibration Motor Acronyms And Terms
There are a number of technical terms and acronyms that some readers may find daunting, so here we outline some of the more important ones. This list is by no means comprehensive.
- ERM = Eccentric Rotating Mass, this is the weight found on rotating vibration motors that produce the vibration
- BLDC = Brush-less Direct Current, this motor does not have brushes hence it is brush-less
- LRA = Linear Resonant Actuator, a unique type of vibration motor similar in concept to a speaker. Note the form factor is the same as the coin motors below – but they are not ERMs
- Coin Motor = ‘coin’ describes the form factor, they are flat and round. They are actually just ERM motors, there are also brushless versions available
- SMD / SMT = Surface Mount Device / Surface Mount Technology
- PCB = Printed Circuit Board
- Vibration Amplitude = this specification describes the vibration intensity that a motor produces, and is always listed as a normalised value so that different motors can be easily compared.
MTTF = Mean Time To Failure

Get in touch
Speak to a member of our team.
Motor catalogue
Looking for our products?
Reliable, cost-effective miniature mechanisms and motors that meet your application demands.
How To Select A Vibration Motor
Regardless of your particular application, you will usually be able to identify some key requirements such as vibration speed, driving voltage or the maximum permissible motor size. Once these requirements are identified it will be much easier to select the most appropriate motor from the large (and growing) range of vibration motors that we offer. Our Product Catalogue shows all of our stocked motors, while our Sales Engineers have access to a large database from which we can recommend motors.
Note that almost all factors are dependant upon the voltage applied. The voltage controls the speed of the motor, the faster the motor turns the higher the vibration amplitude and frequency. See the sections below for more information, the figures in the table are all at the Rated Voltage.
| Brushed ERM | BLDC ERM | LRA | |
|---|---|---|---|
| Typical Diameter | 3.2mm to 45mm | 10mm to 12mm | 8mm to 10mm |
| Form Factor | Coin, Cylindrical (also encapsulated /enclosed) | Coin, Cylindrical | Coin |
| Longevity (MTTF) | 100 – 600 hours | 1000+ hours | 1000+ hours |
| Normalised Vibration Amplitude | 0.25G ~ 150G | 1G ~ 30G | 0.75G ~ 2G |
| Rated Vibration Frequency | 30Hz ~ 500 Hz (1,800 RPM ~ 30,000 RPM) | 200 Hz ~ 208 Hz (12,000 RPM ~ 12,500 RPM) | 150 Hz ~ 205 Hz |
| Mounting Techniques | Spring pad, SMD/SMT, PCB Through-hole, adhesive, enclosure, bulkhead | Adhesive, enclosure, bulkhead | Adhesive backing |
| Rated Voltage | 1.5V ~ 24V | 3V ~ 5V | ~2V RMS |
| Driver Chip | Optional, recommended for haptics | Recommended, sometimes integrated into the motor | Recommended, requires AC signal |
| Vibration Direction | Dual Axis (Z and X) | Dual Axis (Z and X) | Single Axis (Typically Y) |
| Priority (Cost vs Longevity) | Cost-effective | Long-life | Long-life |
Vibration Motor Form Factor
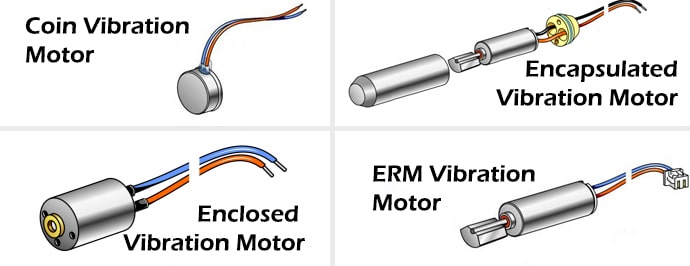
Cylindrical
This exposed style of vibration motor is perhaps the most common as it is uncomplicated and cost-effective, the ERM is clearly visible and unprotected.
Coin
Compact and easy to use, they are typically supplied with an adhesive backing. This style of motor can also be considered enclosed, as the ERM is protected by the body housing. Note that although LRAs are in the ‘coin’ form factor, they are very different internally – see the coin motor here and the LRA here.
Encapsulated
The motor itself is fully covered by plastic or metal housing, designed to be over-moulded. They are our motors that are most resistant to the ingression of dust and liquid. We have other articles covering over-moulding and IP ratings.
Enclosed
These motors are covered by plastic or metal housing, but have ventilation or mounting holes in the casing. They have no moving external components and are useful when the ERM should be protected from objects or users but don’t require the resistance of encapsulated motors.
Sizes
Highly popular and low cost, ERM style vibration motors are available in a wealth of sizes. From a diminutive 3.2mm up to 45mm diameter, they can be used in all manner of applications.
LRAs are a relatively new style of vibration motor, and the available range of sizes is slowly expanding. They are typically coin form factor, 8 ~10mm diameter and 2 ~4 mm thick.
BLDC vibration motors are available in similar sizes as the brushed ERMs, although the range isn’t quite as expansive.
Longevity (MTTF)
Longevity refers to how long the motor can operate before failing. It is common to express this as the Mean Time to Failure, which is measured in hours. There’s some statistical wizardry behind these numbers, you can read about it in AB-019: Lifetime of DC Vibration Motors (MTTF & FIT).
While brushed DC motors are cost-effective and easy to operate, they are not as robust as their brushless counterparts. The most common failure mode is due to damaged or worn brushes, although on rare occasions the bearings may fail first.
As they do not have brushes BLDC and LRA vibration motors are more reliable, with lifespans in the thousands of hours. LRAs are particularly reliable as they have no rotating parts.
Vibration Amplitude
Vibration amplitude is dependant upon the voltage applied. Essentially, a greater voltage increases the torque output, which increases the speed, which increases the force. Almost all specifications and characteristics on the datasheets are given at the rated voltage of the motor. Typical Performance Characteristic Graphs show how these vary with the voltage.
There are other characteristics that impact the vibration amplitude, but these are set during manufacturing. We have a wide range of ERM vibration motors available at a variety of different vibration amplitudes in stock, but we are also able to customise models for specific applications.
For LRAs, a similar theory applies. The greater the voltage applied, the greater the acceleration of the internal mass, the greater the output force. However, as the LRA comprises of a single unit, they are not as easily customised.
Vibration Frequency
Vibration frequency is also dependant on the voltage applied, as it is directly related to the speed of the motor. It may be necessary to select a motor with a specific vibration frequency because it can be important for specific applications and affects the level of displacement, however many find it a non-critical factor in their application.
LRAs are much more restrictive on frequency. They are driven by an AC signal which should be extremely close to their rated resonant frequency (±5 Hz) because of their high ‘Q factor’.
Vibration Motor Mounting Techniques
Just as there are many different form factors there are many ways to mount vibration motors. This section is more concerned with the shape of the vibration motor rather than how it operates, i.e. the external design instead of the internal design.
Coin type motors and LRAs typically feature an adhesive backing, while others may have mounting holes on the front face. They can be inserted into enclosures or strapped to bulkheads. A growing number of applications are implementing haptics effects in wearable or flexible technology.
To PCB
Vibration motors are commonly mounted onto PCBs, there are a number of ways to ensure they have good electrical and mechanical contacts. Each of the bullet points is a link to more information on the type of connector, there’s also a full Application Bulletin linked below.
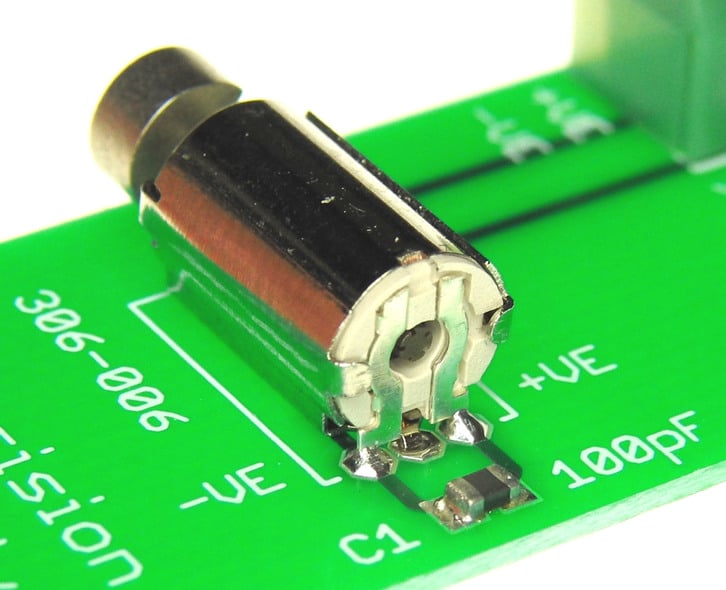
Spring Pad
A rubber boot helps ensure a reliable fit in injection moulded enclosures, one side of the motor features two sprung terminals which interface with contacts on the PCB.
SMD / SMT
Designed for convenient and efficient use in production volumes, this style of motor is well suited to pick-and-place assembly and typically comes supplied in reels. They are then soldered using a process known as ‘reflow soldering’.
Through-hole
Small holes in the PCB match the position of mounting pins on the motor. They are then soldered in place, some pins transmit power to the motor while others fix the motor to secure it in place. Some motors have pins for mounting, but still, use leads for power connections.
Adhesive Backing
Typically seen on coin-type vibration motors or LRAs, this is a convenient method for quick mounting using the pre-attached adhesive backing. Simply remove the tape and stick in place.
Within Enclosures
This method allows for the effective transmission of vibration as the motor is typically mounted directly against the enclosure. The enclosures can be injection moulded or machined making them very space efficient but note the tolerances to ensure ERMs aren’t impeded.
To Bulkheads
‘Bulkhead’ means a large flat surface, like the side of a chute or hopper.
There are many ways to attach a vibration motor to a bulkhead, whether that be by using P Clips, mounting holes on the motor face, or specially designed mounting brackets like the 445-000 (part has since been depreciated, along with 345-XXX vibration motors). Typically used for larger vibration motors it allows them to be attached to a variety of objects in many different orientations.
In Flexible Materials
An increasing amount of applications require vibration motors to be mounted in flexible products that are often worn on the body. The eccentric mass needs to be free to rotate, so coin type (including LRAs), enclosed, encapsulated motors are all ideal for such applications because they are less likely to be impeded or damaged.
Full AB-010: Mounting Vibration Motors to Flexible Materials and Clothing
Rated Voltage
This is the voltage at which the motor is designed to be powered at. Typically the motor can be driven below or (slightly) above this voltage, however, its performance will change as explained in the provided the Typical Performance Characteristics Graph. It is common to deliberately adjust the voltage to achieve a variety of different vibration patterns and effects.
For reliable operation, the minimum recommended driving voltage is the Maximum Start Voltage (formally called ‘Certified Start Voltage’). If you intend to vary the voltage, there are 4 important values to consider.
Driving Techniques
| Brushed ERM | BLDC ERM | LRA | |
|---|---|---|---|
| Direct | Yes | Yes (with integrated driver only) | No |
| PWM | Yes | No | No |
| DC Motor Driver IC | Yes | Yes (with integrated driver only) | No |
| BLDC Driver IC | No | Yes | No |
| LRA Driver IC | No | No | Yes |
| Haptic Driver IC | Yes | No | Yes |
A motor is only as capable as the driving method allows it to be. A motor being directly driven from a battery will vibrate at one level, whereas a driver opens up many more possibilities. Of course, this increased capability usually incurs a cost in the extra hardware and design required.
Brushed DC motors are very simple to drive, they only require DC voltage. This voltage can be adjusted using a number of different techniques, with perhaps the most common being PWM control.
A full article on available drive components can also be found in AB-023: Motor Drive Resource.
Direct
- Power Supply / Battery
The simplest way to drive a motor is directly from a power source such as a bench top power supply or a battery. This is the simplest connection method and is commonly used for ‘vibration alerting’ applications that require an on / off vibration.
The main limitation of this method is the lack of control, it is essentially impossible to implement haptic effects. Read more about the difference between vibration alerting and haptic feedback in this integration guide.
- Potential Divider circuit
This simple circuit lowers the voltage seen by the motor, by using a varistor it is possible to change the driving voltage while the motor is in operation. As it requires manual adjustment, the ability to implement haptics effects is also limited when using this method.
PWM Signalling
This method is very common and has great flexibility, it uses rapid pulses of electricity to produce an effectively varying voltage. The PWM signal is created by a separate chip, normally a microcontroller.

It should be noted that many motor drivers use PWM as an input, but it is also possible to use a PWM signal directly into a motor. This section covers the latter, you can read below about driver chips that use PWM.
As sources of PWM are extremely limited in output current, a transistor must be used to connect the motor to a high current source. There are two common circuits based on this:
A single transistor acts as a switch, connecting the motor to a high current source whilst being controlled by the low current PWM signal. This is an extremely cost-effective and simple way to vary the vibration amplitude to a vibration motor with a microcontroller.
One drawback of the above method is the voltage can only be applied in one direction. By reversing the polarity as the motor is in rotation, you can ‘brake’ the motor to make it stop quicker.
The H-bridge is more complex than a simple single transistor, connecting 4 different transistors in a circuit that resembles the letter H. However, for truly advanced haptics we recommend an IC, as discussed below.
Driver IC
There is a huge range of driver chips available, which can greatly vary depending on a number of factors. The AB-023: Motor Drive Resource is the best place to compare chips, below is a brief discussion on each type of motor driver.
- DC Motor Drivers
There are chips that are designed to drive DC motors and gear motors. However, as they are all based on a standard DC motor, they can also be used to drive ERM vibration motors. In addition, you can purchase integrated H-bridge chips to implement the H-bridge circuit above in a single IC.
- BLDC Driver
Brushless motors require a dedicated driver chip. Sometimes these are integrated into the motor but often they require an external driver to be designed into the circuit, as with the 912-101.
It is important to note that for motors with integrated drivers, like the 910-101, it is not possible to control them with PWM – the leads connect directly to the driver chip and PWM rapidly switches the IC on / off.
Our M10-400 is an evaluation board for the Texas Instruments DRV11873. It’s a very basic circuit and can be used as a standalone unit, or as a prototype and reference design for driving brushless motors.
- LRA driver
To facilitate the oscillating movement of the mass in an LRA the driving signal must also oscillate, specifically at the resonant frequency of the LRA. This means LRAs require an AC drive signal, which can be difficult to create if unfamiliar with electronics.
There are dedicated LRA drivers available that make designing the circuit much simpler. They often accept PWM as an input, but some are available with a simple on/off GPIO signal.
As the LRAs are often used in haptic feedback applications, it is common to use a specialised haptic driver, as below.
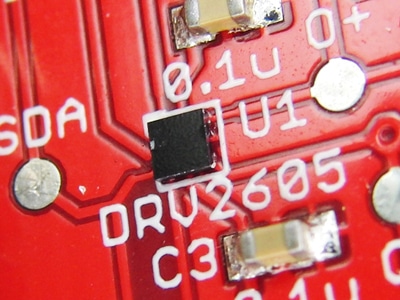
- Haptic Driver
A specialised haptic driver, such as the DRV2605, greatly simplifies incorporating haptic feedback. They often support both ERMs and LRAs and include features that make them essential for high-end haptics such as overdrive, active braking, and resonance detection (LRA only).
They are available GPIO, PWM or I2C inputs, and some even include a library of waveforms. Those seeking a simple on/off vibration will not get the advanced benefits offered by these haptic drivers and should consider the cheaper options listed above.
Vibration Direction
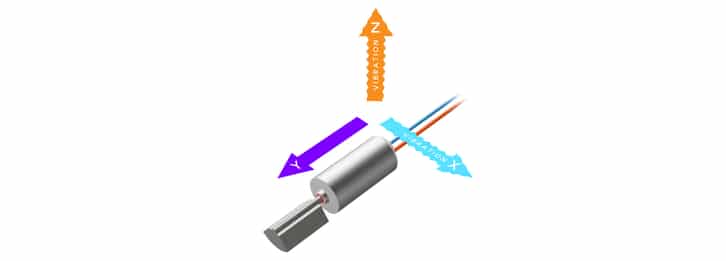
The direction of vibration really sets apart the ERMs from the LRAs. As ERMs rotate a mass, there is a force produced in two axes – both perpendicular to the motor shaft. This applies to coin motor ERMs too, their shaft is extremely short and is in the centre of the circular surface. As coin motors are mounted on their back, they provide a good alternative vibration direction to cylindrical ERMs. As the vibration direction comes from the mechanical movement of the motor, it is the same for brushed ERMs and BLDC ERMs.
LRAs are different. They operate with a mass on a spring that moves along one axis, therefore they only produce vibration on one axis. This is typically in the ‘Y’ or the vertical axis for a coin-type LRA mounted on its back. However, there are horizontal LRAs also available – the important point is the single direction of vibration.
The concept of vibration direction is best understood when visualised. Our previous Application Bulletin on user interfaces discusses this topic in detail, including accompanying diagrams like the one above – check the link below for more information.
AB-014: Mechanical Layout of Vibration Motors for Typical User Interfaces and Controls
Cost Vs Longevity
Commercial reality dictates that most applications require a product that is suitably priced, which partially explains the popularity of cost-effective brushed vibration motors.
ERMs are inexpensive, easy to implement (reducing time spent designing and testing), and require few additional electronics. The tradeoff is that their commutator and precious metal brushes will eventually fail. However, some models have been tested to get thousands of hours of operation – which in many applications exceeds the life expectancy of the product.
LRAs are high-performance and reliable alternatives for haptic feedback. However, they require a driver to operate which can see a slight increase in the complexity and total cost.
The high build quality of a BLDC motor carries a higher price, however for some applications, the total lifetime cost can be comparable to an equivalent brushed motor.
Conclusion
While the large number of differences and options may make selecting a motor style difficult, the reality is that once the design has been suitably constrained the most appropriate motor will often be clear. We have trained engineers on hand to help you select a motor, don’t hesitate to get in touch.
Newsletter
Sign up to receive new blogs, case studies and resources – directly to your inbox.

Sign up
Discover more
Resources and guides
Discover our product application notes, design guides, news and case studies.
Case studies
Explore our collection of case studies, examples of our products in a range of applications.
Precision Microdrives
Whether you need a motor component, or a fully validated and tested complex mechanism – we’re here to help. Find out more about our company.