Reading the Motor Constants from Typical Performance Characteristics
DC motor constants can be a confusing world, there’s a lot of differing information and relationships can be difficult to figure out due to inconsistent naming and units.
You shouldn’t need to find the constants for our vibration motors, they already have a fixed load and all the pertinent information like vibration amplitude and frequency is available on the datasheets you can download from our Product Catalogue. However, you may want to know the constants for our DC motors and DC gearmotors.
We will do our best to clarify as many of the different names as possible below. We will also use the SI units – something that is missing from a lot of guides.
Torque Constant \(k_{t}\)
AKA: “Motor constant”
SI Units: \( \frac{Nm}{A}\)
Relationship: Torque over Current
Value: holds the same value as the motor voltage constant, \(k_{e}\), below. That is \(k_{t} = k_{e}\).
Motor Voltage Constant, \(k_{e}\)
AKA: “electic constant” , “counter emf equation constant” , “back-emf constant” , \(k_{b}\)
SI Units: \( \frac{V}{rads^{-1}}\) (or voltage over radians per second)
Relationship: Voltage over Speed
Value: holds the same value as the torque constant, \(k_{t}\), above. That is \(k_{e} = k_{t}\).
Speed Constant, \(k_{s}\)
AKA: “Speed equation constant”
SI Units: \( \frac{rads^{-1}}{V}\) (or radians per second over voltage)
Relationship: Speed over Voltage
Value: the inverse of the motor voltage constant, i.e. \(k_{s} = \frac{1}{k_{e}} = \frac {1}{k_{t}} \)
You can read or calculate the above constants from our datasheets. It is important to remember the above relationships are based on ideal motors, and do not take losses such as friction into account. Therefore there may be some variation in your resulting figures.
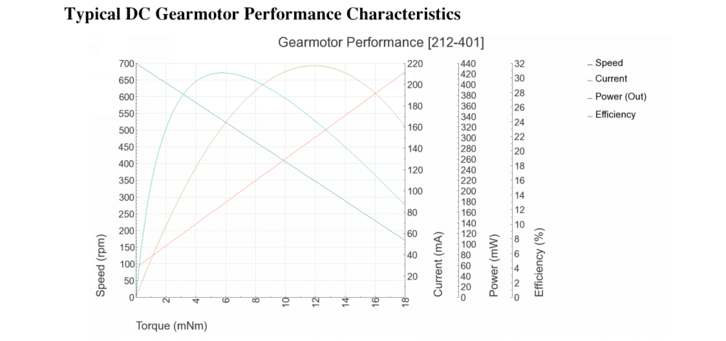
To calculate the Torque Constant read the current draw at a given torque on the Typical Performance Characteristics graph. Now divide the torque by the current.
To calculate the Motor Voltage Constant read the no-load speed (rpm) and convert it to radians per second. Take the Rated Voltage of the motor and divide it by the speed.
To calculate the Speed Constant read the no-load speed (rpm) and convert it to radians per second. Divide this number by the Rated Voltage.
Be sure to convert all your readings to the correct units before making the calculations, especially speed (RPM -> radians per second). If for some reason you can’t calculate the constant you need, remember the relationships
For brushed DC motors and SI units: \( k_{t}(\frac{Nm}{A}) = k_{e}(\frac{V}{rads^{-1}})=k_{s}(\frac{rads^{-1}}{V}) \)

Get in touch
Speak to a member of our team.
Motor catalogue
Looking for our products?
Reliable, cost-effective miniature mechanisms and motors that meet your application demands.
Newsletter
Sign up to receive new blogs, case studies and resources – directly to your inbox.

Sign up
Discover more
Resources and guides
Discover our product application notes, design guides, news and case studies.
Case studies
Explore our collection of case studies, examples of our products in a range of applications.
Precision Microdrives
Whether you need a motor component, or a fully validated and tested complex mechanism – we’re here to help. Find out more about our company.